Pesquisa da NVIDIA impulsiona a robótica da simulação para o mundo real
A robótica está entrando em uma nova fase: movendo-se de demos controladas e automação roteirizada para autonomia incorporada generalizável e confiável no mundo real. Na International Conference on Robotics and Automation (ICRA), oito dos 28 artigos aceitos da NVIDIA Research mostram como a transferência da simulação para o mundo real está se tornando a base para essa mudança, ajudando os robôs a perceber, raciocinar, planejar e [...]
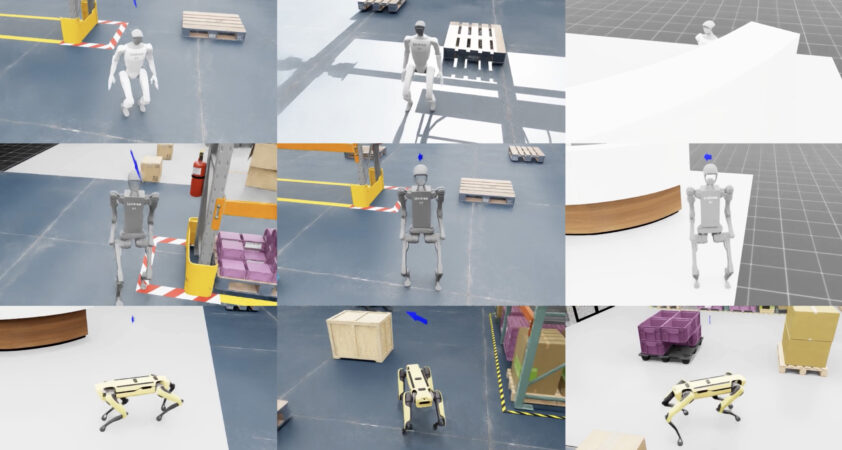
A robótica está entrando em uma nova fase: movendo-se de demos controladas e automação roteirizada para autonomia incorporada generalizável e confiável no mundo real. Na International Conference on Robotics and Automation (ICRA), oito dos 28 artigos aceitos da NVIDIA Research mostram como a transferência da simulação para o mundo real está se tornando a base para essa mudança, ajudando os robôs a perceber, raciocinar, planejar e agir em ambientes dinâmicos e imprevisíveis. Juntos, os artigos abrangem todo o espectro de desafios que os desenvolvedores de robôs enfrentam: coordenar múltiplos braços em paralelo, construir políticas que generalizam para diferentes corpos de robôs, agarrar objetos novos em meio a bagunça, realizar montagens precisas e desenvolver modelos de visão-linguagem-ação que raciocinam antes de se moverem. A linha comum é clara: sim-para-real está se tornando uma base para robôs que podem se adaptar, generalizar e operar com maior confiabilidade fora do laboratório. Coordenando Braços, Navegando Corpos, Agarrando Objetos Imagine um laboratório farmacêutico operado por braços robóticos: pegando tubos, transferindo líquidos, misturando reagentes — cada etapa levando diferentes quantidades de tempo, todas exigindo coordenação cuidadosa. Softwares tradicionais de agendamento de robôs lidam com essas etapas sequencialmente, um braço por vez. O ScheduleStream muda isso ao executar cálculos em GPUs, permitindo que múltiplos braços planejem movimentos e operem em paralelo. O resultado — um aumento de 3x na velocidade em cenários de planejamento multi-braços, em hardware como a plataforma de IA de borda NVIDIA Jetson. O código para a estrutura está disponível no GitHub. https://blogs.nvidia.com/wp-content/uploads/2026/05/supplementary.mp4 Um robô que aprende a navegar por um espaço — evitando obstáculos e encontrando seu destino — geralmente aprende a fazê-lo em um único corpo. Coloque o mesmo software de navegação em um robô com formato diferente e ele frequentemente falha, porque suas partes se movem de maneiras diferentes. A estrutura de política COMPASS resolve isso construindo primeiro a funcionalidade básica de navegação usando aprendizado por imitação e, então